我的项目
展示我的技术实践和项目经验

基于YOLOv11的全自动水下垃圾回收机器人
项目负责人
为了解决复杂水下环境中垃圾清理效率低下的问题,本项目在白洋淀水下垃圾清理场景中,机器人首次在水下应用变分图像分解技术对图像预处理,再将图像交给YOLO V11神经网络进行识别。通过深度学习进行算法优化,实现对垃圾的精准识别,同时强化学习使其能够根据实际作业环境自主决策,优化作业路径和回收策略,实现水下垃圾的精准识别与回收。主要承担基于变分图像分解技术优化水下图像预处理,提升复杂水域垃圾检测精度,带领团队在白洋淀水域进行机器人捕捉水下垃圾测试,目前已实现机器人下水、垃圾图像识别以及垃圾捕捞。
基于数字全息和人体耳廓特征密钥的光学图像隐藏
项目负责人
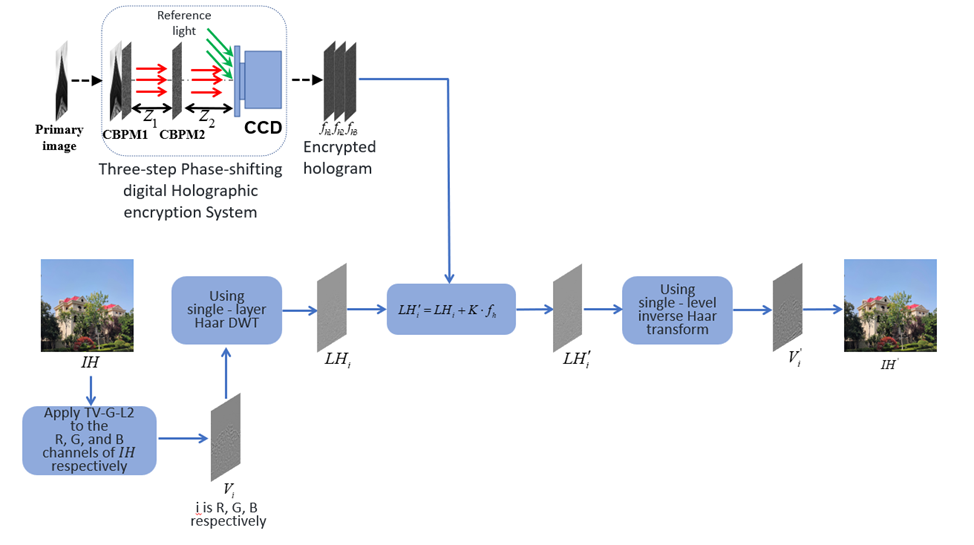
传统隐藏方案中,密钥与用户身份缺乏生物特征关联,存在身份验证漏洞。为解决这一问题,通过变分图像分解,将加密全息图嵌入中频子带实现信息隐藏,提高了图像隐藏的鲁棒性;同时使用人体耳廓生物特征作为密钥,增加了密钥与用户的身份关联。使用MATLAB将人体耳廓特征数字化处理,通过安全哈希算法与混沌映射生成的随机相位掩模作为加密过程的中间变量,明文被加密为三幅类噪声全息图;基于变分图像分解与小波变换对载体图像进行多频段分解,将加密全息图嵌入中频子带实现信息隐藏。测试隐藏方案在不同攻击干扰下的鲁棒性,通过改变耳廓特征密钥的参数设置评估密钥对隐藏信息安全性的影响,运用解密图像与原始图像的相关系数对实验结果进行量化分析。
多模态情感交互机器人
独立开发者
一款能够"读懂"人心的桌面机器人。通过摄像头捕捉用户面部微表情,结合语音语调分析用户情绪状态。机器人头部设有 6 自由度舵机结构,能根据用户情绪做出开心、安慰、惊讶等拟人化动作反馈,提供陪伴式交互体验。